The robotic exploration of Mars is at the center of recent international missions and even in Leonardo's laboratories cutting-edge robotic systems are being studied to contribute to the discovery of the secrets of the Red Planet. As part of NASA's "Mars Sample Return" campaign, in collaboration with the European Space Agency (ESA), Leonardo has signed a contract with Airbus for the advanced study phase (Advanced B2) of the robotic arm of the Sample Fetch Rover ( SFR) of ESA and obtained funding from ESA to continue the study of the Sample Transfer Arm (STA) for the NASA lander.
Leonardo, also thanks to the important contribution of the Italian Space Agency, is therefore involved in the study of two elements of the 2026 mission of the Mars Sample Return campaign, the arm of the rover and that of the lander. For both, Leonardo is now busy designing their respective robotic sample acquisition and manipulation systems.
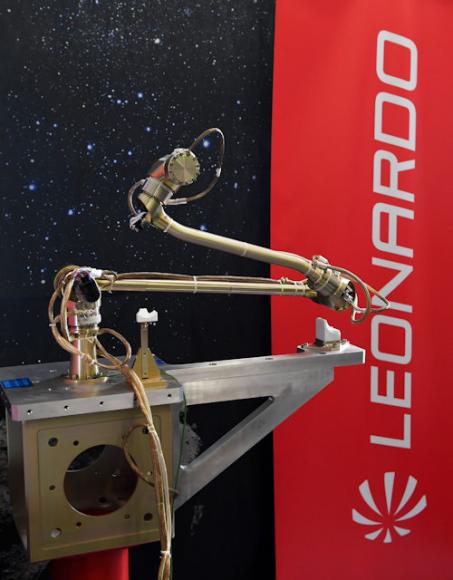
The robotic arm of the SFR rover, whose industrial consortium is led by Airbus UK, after an initial phase of study and testing, now enters the advanced phase of designing and developing the first prototype (breadboard) to demonstrate the high capabilities of the system. It will be an arm with 6 degrees of freedom that can be extended up to about 110 cm and a gripper, or a pliers, complete with a control system. The STA of the NASA lander is instead a more complex arm, with 7 degrees of freedom that exceeds 200 cm in extension and now enters the breadboard development phase. In this case, Leonardo is responsible for an international industrial consortium also responsible for the design of the control electronics, software and vision system.
Both arms are based on the experience gained in the realization of the DELIAN and DEXARM models, developed by Leonardo, still considered reference standards in the European space market. The company also has strong knowledge in the field of space drills, designed for missions such as Rosetta, ExoMars and Luna-27.
For MSR, Leonardo will also contribute to the Earth Return Orbiter (ERO) through Thales Alenia Space (joint venture between Thales 67% and Leonardo 33%) which will be responsible for supplying the communication system that will allow the transmission of data between Earth, ERO and Mars. It will also design the Orbit Insertion Module and manage the Assembly Integration and Test (AIT) phase for the Proto-Flight model of the ERO probe.
Mars Sample Return (MSR)
ESA and NASA's MSR campaign includes three missions that will be launched starting in 2020. These missions will work together to achieve the ambitious goal of bringing soil samples from Mars to Earth in 2031.
NASA's first “Mars2020” mission, launched last July, will see the Perseverance rover excavate and collect material from the Martian soil. Perseverance will seal the rock and soil samples in special containers and drop them on the ground in strategic locations awaiting the next mission.
Starting in 2026, the “Sample Retrieval Lander” is the second mission of MSR. This mission is in turn composed of three elements: the NASA lander, ESA's Sample Fetch Rover, and the Mars Ascent Vehicle (MAV). Leonardo is involved in the study of the arms for the NASA lander and the ESA rover which will have different characteristics and tasks. The rover, with the help of the robotic arm, will search and collect samples on the ground and take them to the NASA lander. The NASA lander with its ESA arm will transfer the samples to the MAV which will launch them into the Martian orbit.
Finally, the third mission "Earth Return Orbiter" (ERO) will be programmed in relation to its task of collecting "on the fly" the container with the samples in the orbit of Mars and bringing them to Earth. Leonardo, through Thales Alenia Space, will provide crucial elements of the orbiter. Planned landing in Utah (USA).










